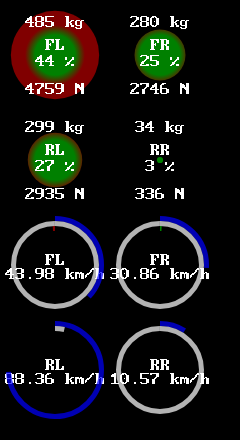
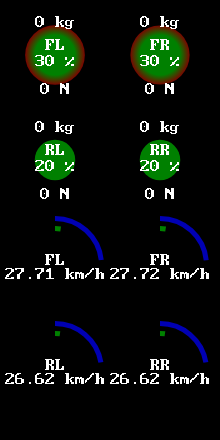
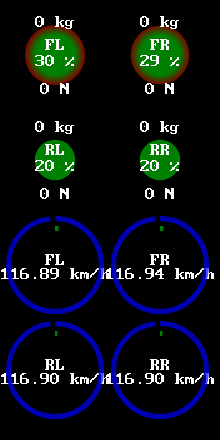
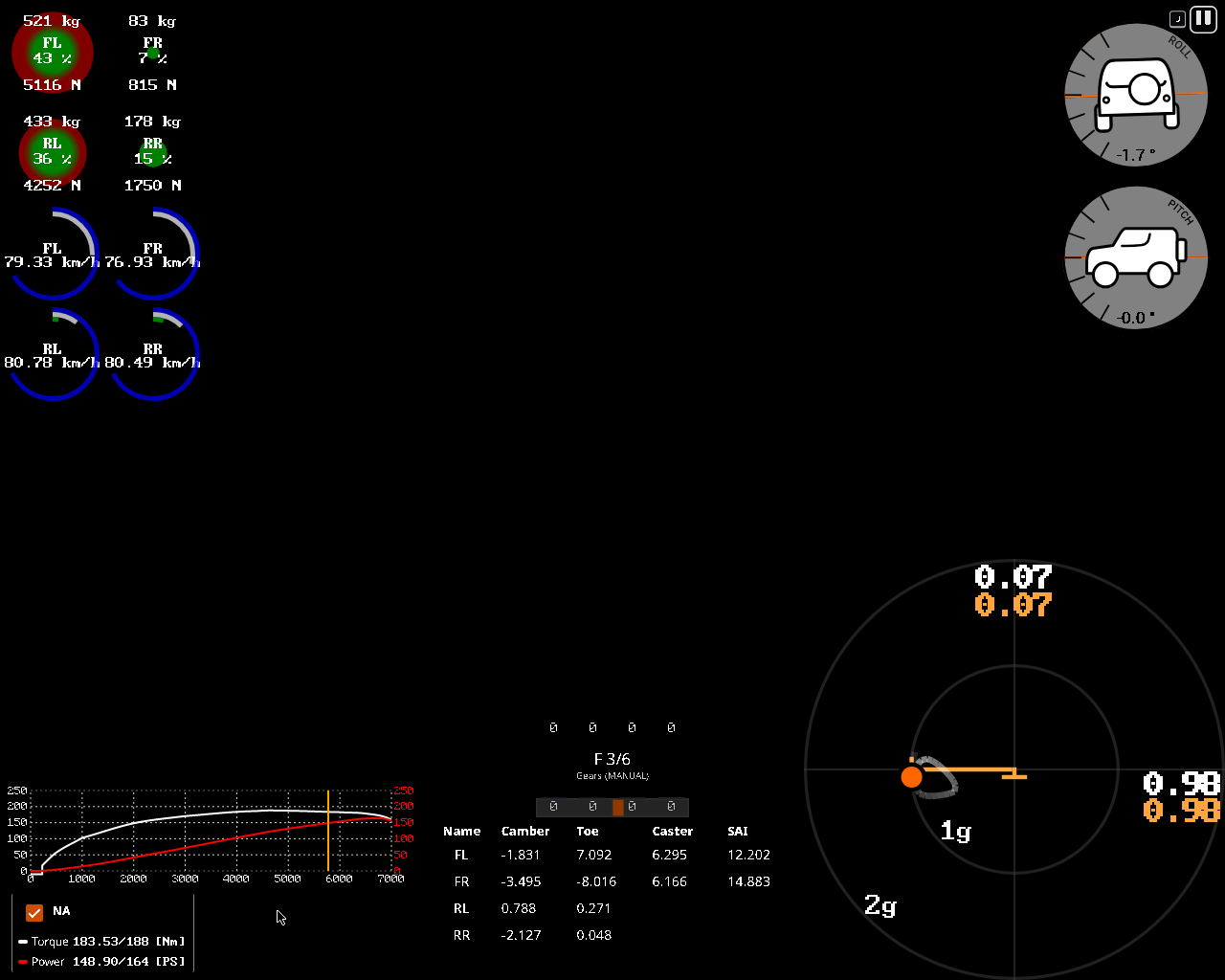
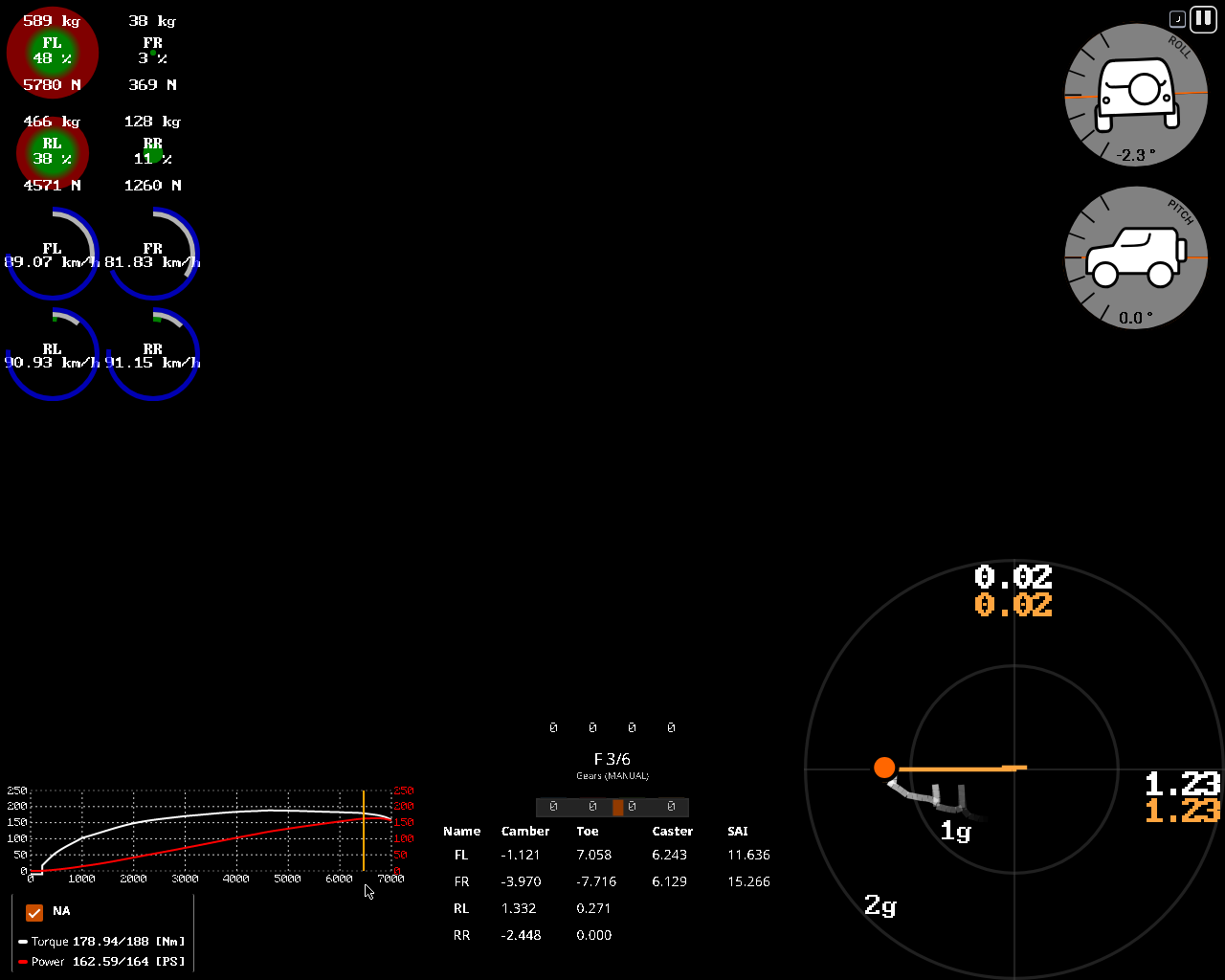
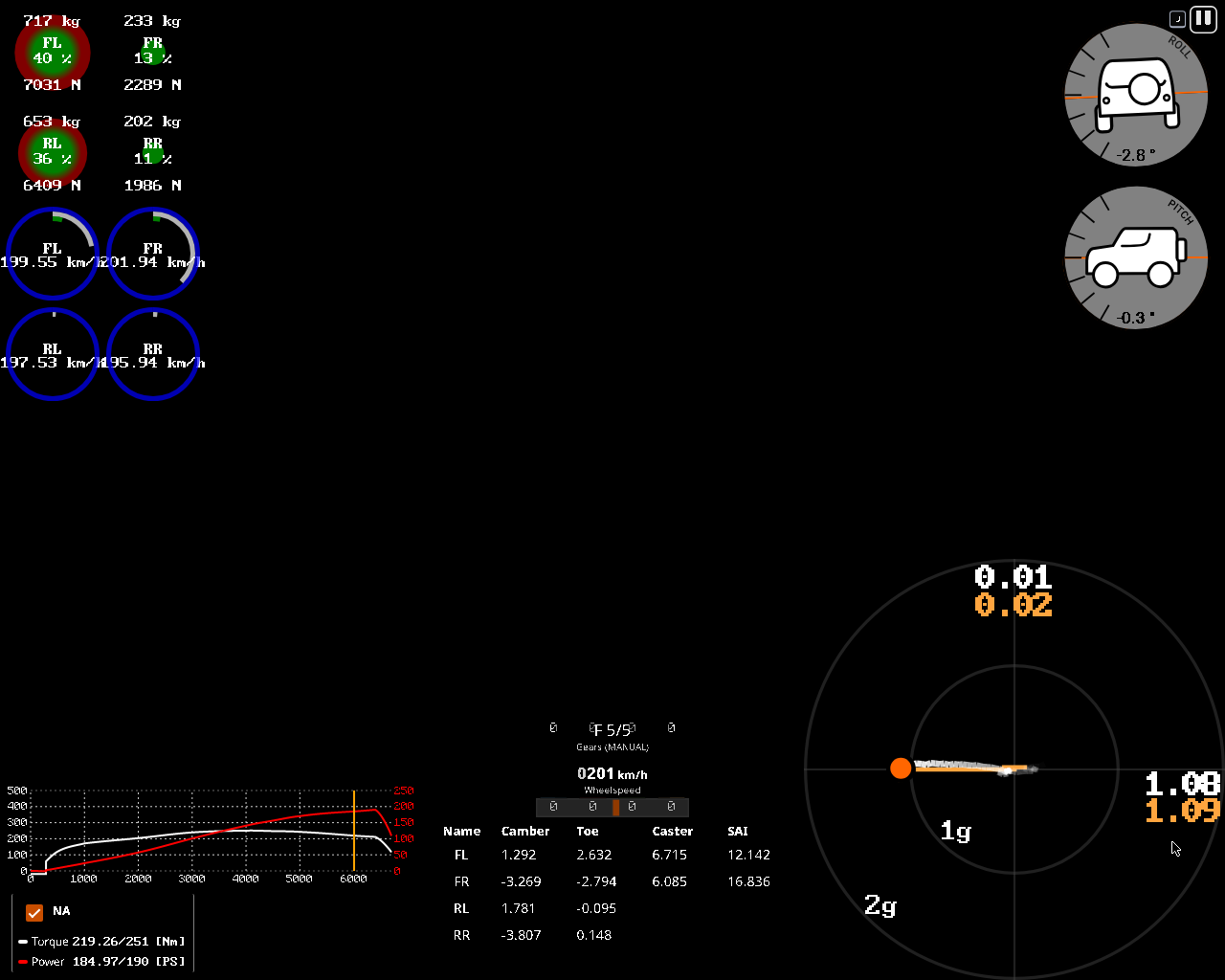
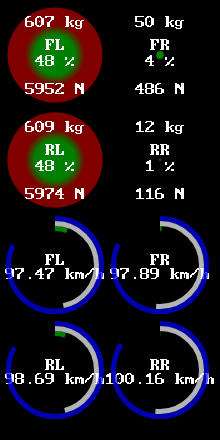
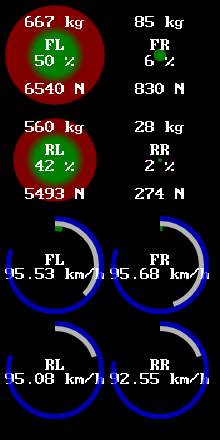
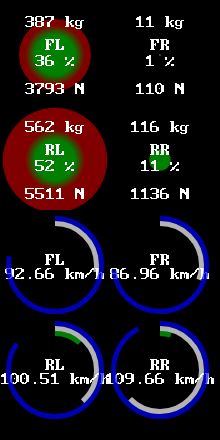
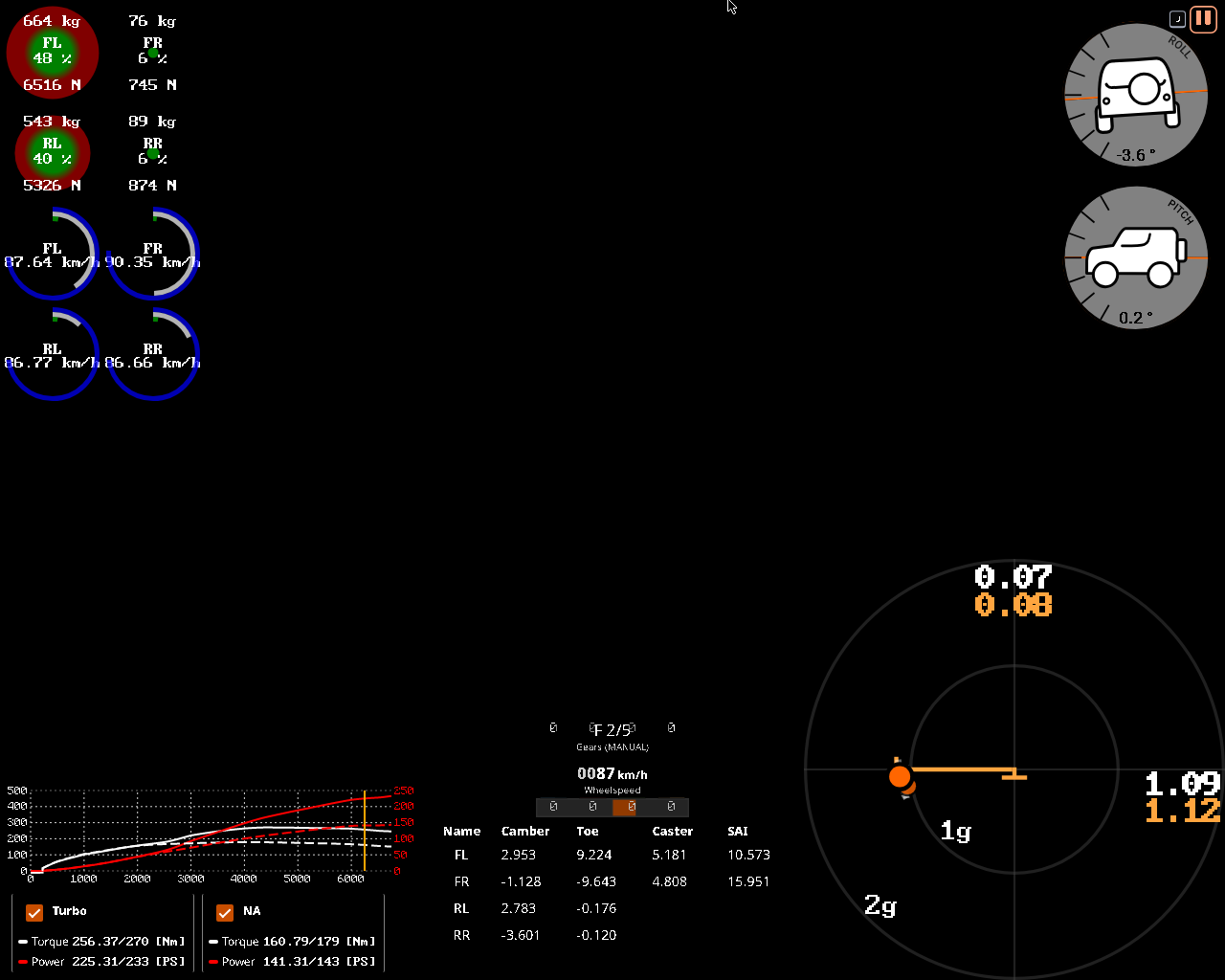
EXAMPLE: difference in lateral acceleration (cornering force) between a sport tyre (treaded, 225/45R16) and a racing (slick, 225/45R16) tyre.
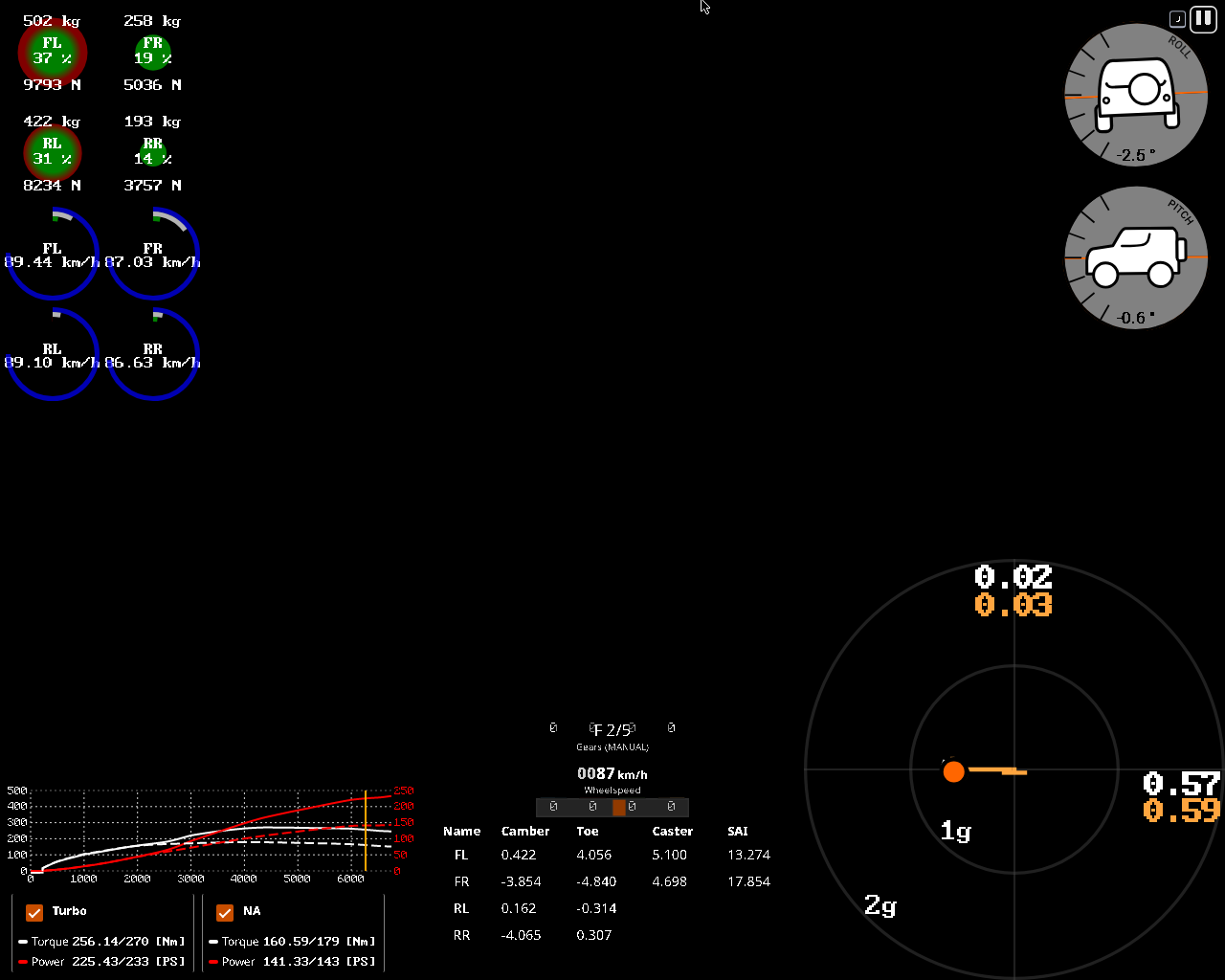
NOTE2: notably, in this steady-state test, the wheels’ (rotational) speed (frequency) (wheel revolution speed) of the slick tyres (~90km/h) is greater (faster) than the sport tyres’ (~80km/h), because they are experiencing more lateral acceleration (1.0g < 1.25g) beyond (outside) the circle (limit) of adhesion (traction), meaning they are slipping at a higher available coefficient of friction/traction, which is evident by the fact that the engine is also operating at higher revolutions per minute (RPM) (~5800RPM < ~6500RPM), but this does NOT necessarily mean that the instantaneous speed of the vehicle itself is increased - only the wheel speed is! this is exactly why one should NOT drift or slide by accident (or otherwise) in order to be fast on a racetrack.
NOTE3: notice that the vertical tyre load (weight distribution) is lesser for the outer tyres in the former (treaded) test (~477kg / ~4650N) than that of the latter (slick) one (~527kg / ~5175N). it can be further increased with even wider tyres, downforce (!) or, alternatively, with an offset wheel (not to be confused with axle track offset).
| typical maximum acceleration irl |
g-force |
| city car throttling |
~0.3g |
| city car braking |
~0.7g |
| city car cornering |
~0.9g |
| racing car throttling |
~0.9g |
| racing car braking |
~1.3g |
| racing car cornering |
~1.5g |
| f1 car throttling |
~3.5g |
| f1 car braking |
~5.5g |
| f1 car cornering |
~6.5g |
| … |
… |
|
|
maximum lateral* acceleration in beamNG |
g-force |
| burnside special stock car |
~0.7g |
| gavril roamer roadsport |
~0.8g |
| gavril bluebuck stock car |
~1.0g |
| bruckell legran race |
~1.1g |
| gavril d trackday |
~1.1g |
| gavril barstow tracksport |
~1.1g |
| ibishu hopper trackday |
~1.2g |
| bruckel moonhawk track |
~1.2g |
| gavril grand marshal trackday |
~1.2g |
| ibishu covet turbo race |
~1.2g |
| ibishu miramar trackday |
~1.2g |
| etk 800 trackday |
~1.2g |
| etk i trackday |
~1.2g |
| soliad lansdale race |
~1.3g |
| bruckell bastion hotlap |
~1.3g |
| cherrier vivace tarmac rally |
~1.3g |
| ibishu bx trackday |
~1.4g |
| etk k gt4 |
~1.4g |
| hirochi sunburst time attack |
~1.5g |
ibishu pessima (gen2) touring car |
~1.6g |
| soliad wendover hillclimb |
~1.6g |
ibishu pessima (gen1) tarmac hillclimb |
~1.6g |
| cherrier vivace hillclimb |
~1.6g |
| civetta scintilla race |
~1.8g |
| hirochi sbr4 tarmac hillclimb |
~1.9g |
| civetta bolide gtr group 5 |
~2.0g |
| … |
… |
|
|
*: vanilla presets; steady-state acceleration, pure cornering, no braking; on a flat surface and at speeds as fast as at least 150km/h.
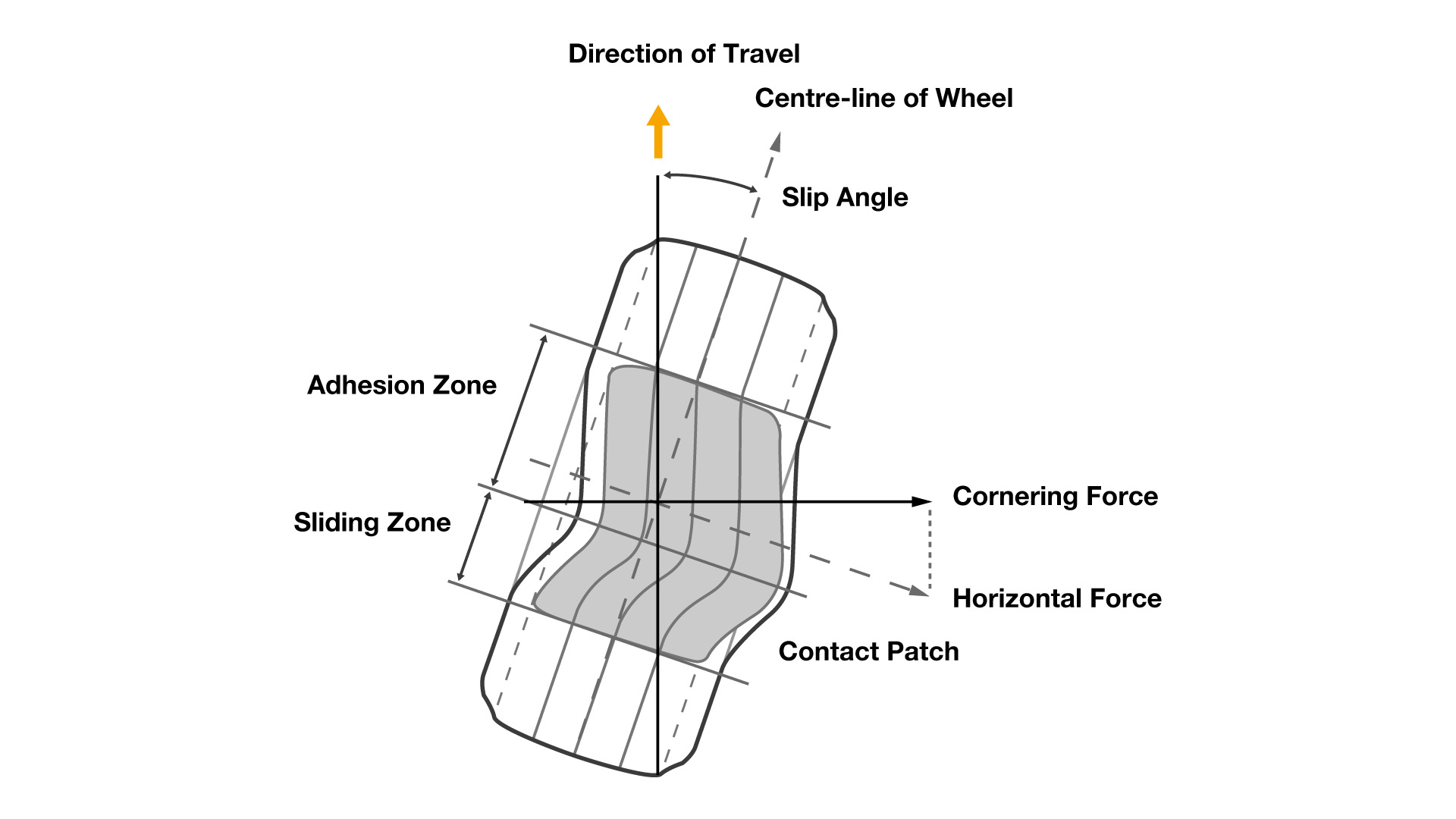
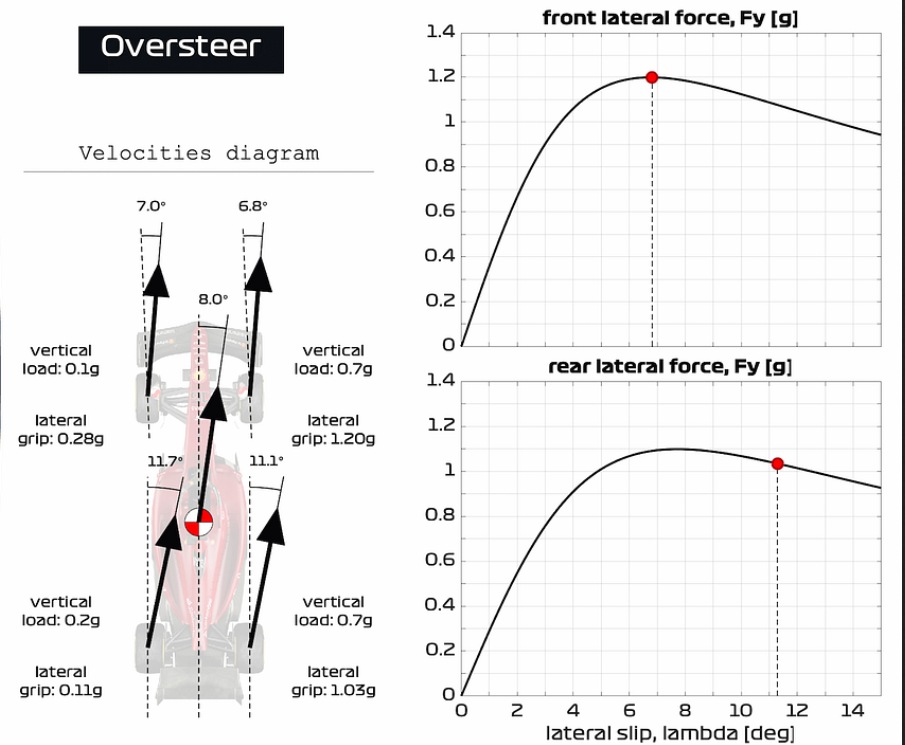
formula one bolides (in dutch, french and italian meaning a fast car) produce a peak of ~6.5g of lateral (cornering) forces at just three (3) degrees of the slip angle, thanks to the downforce producing vertical tyre load applied via the aerofoils. however, it comes at a cost: the decreased coefficient of friction (CoF) means that the vehicle gets unstable (i.e. slipping) quicker than that of production (passenger) cars, which is why they are designed to have a small steering lock (turning radius) (15 to 20 degrees) and a short steering ratio (180 to 360 degrees)[*].
[*][show]
…
the main one is the steering lock, which needs to be 21 degrees in order to get round the loews hairpin (monaco gp). normally an f1 car has a steering lock of 17 degrees.
it is possible to run a standard steering lock and still make the turn, but engineers tell me that it is around 3/10ths of a second slower, so everybody runs the extended steering range.
james allen
…
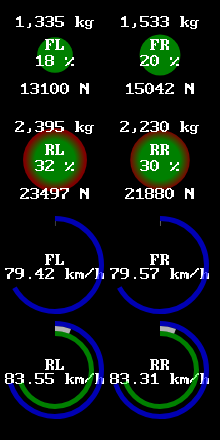
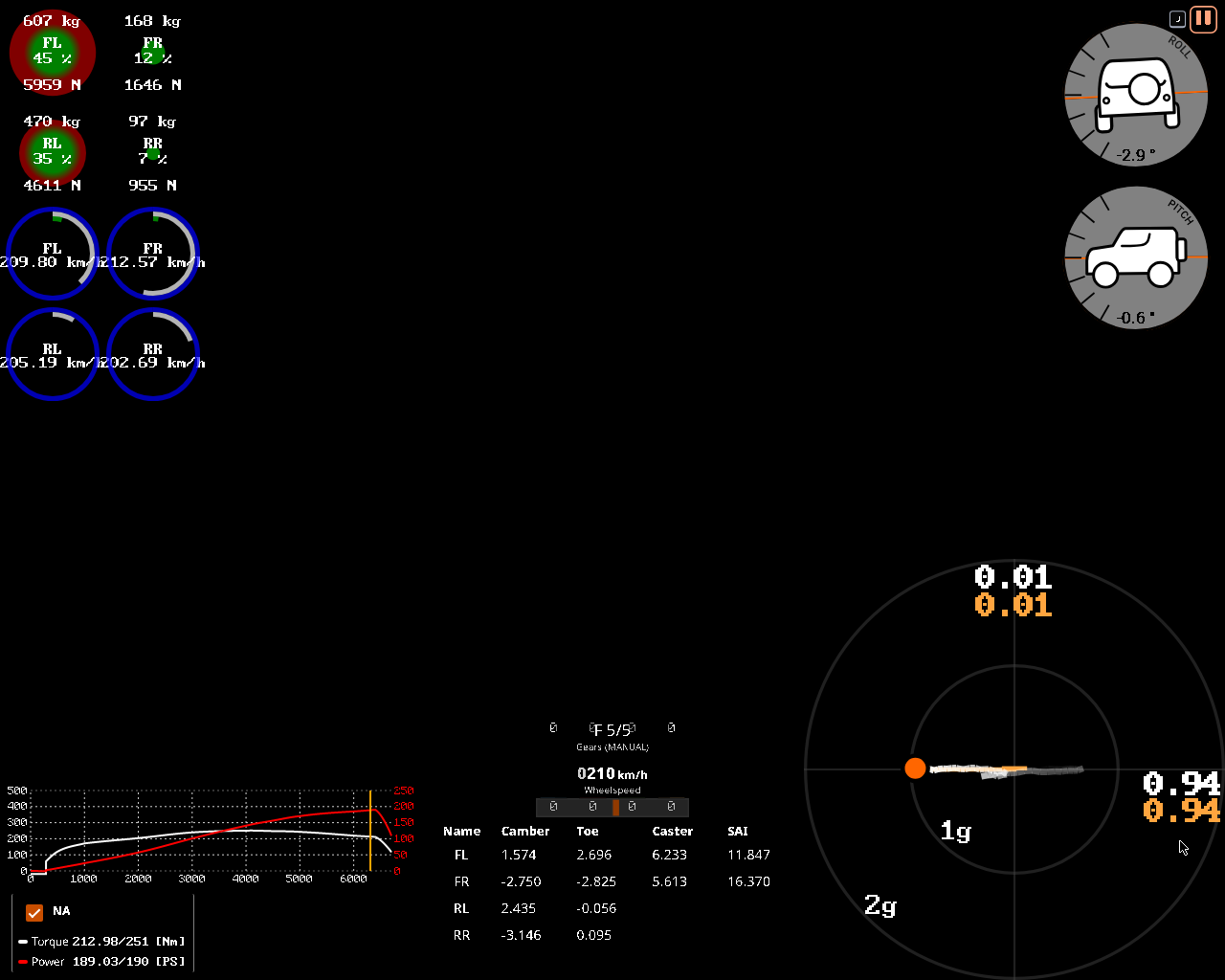
in beamNG, the civetta bolide GTR group 5 is the only car in the game capable of benefitting the most from the downforce alone. it is light (statically: ~235x2kg + ~320x2kg = ~1100kg; dynamically (300km/h): ~390x2kg + ~630x2kg = ~2000kg), which makes it possible to almost double the tyre load, effectively increasing the cornering force. however,
NOTE: the power-to-weight ratio was omitted and will be included in future tutorials.
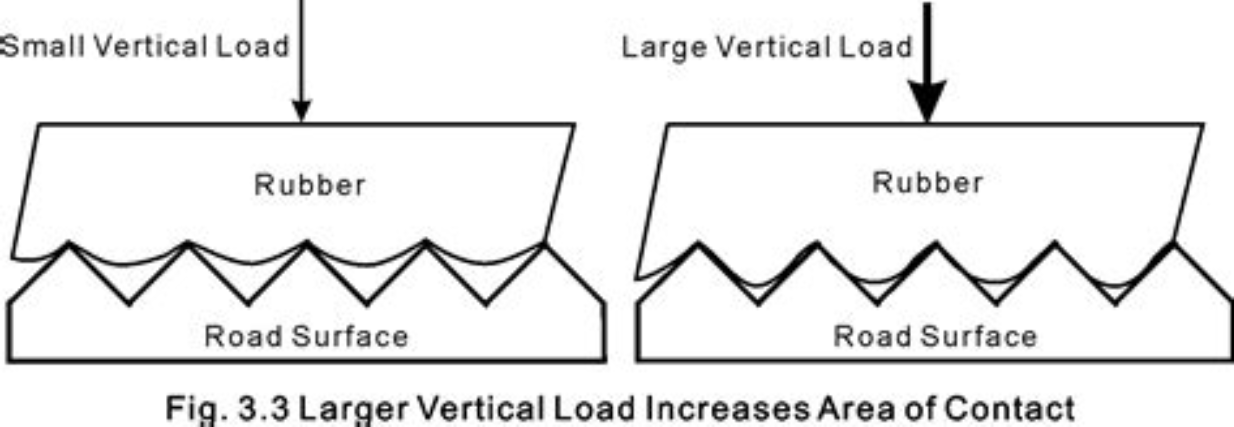
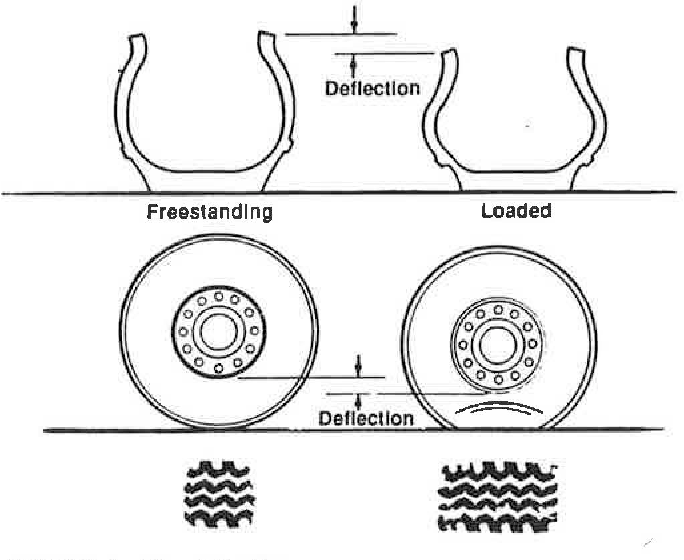
the (vertical) load sensitivity of most real tyres in their typical operating range is such that the coefficient of friction decreases as the vertical load (Fz) increases. the maximum lateral (cornering) force that can be developed does increase as the vertical tyre load increases, but at a diminishing rate.
as mentioned in the article about tyre load sensitivity,
pneumatic tyres do not behave as classical (rigid) friction theory would suggest, as they are non-rigid…
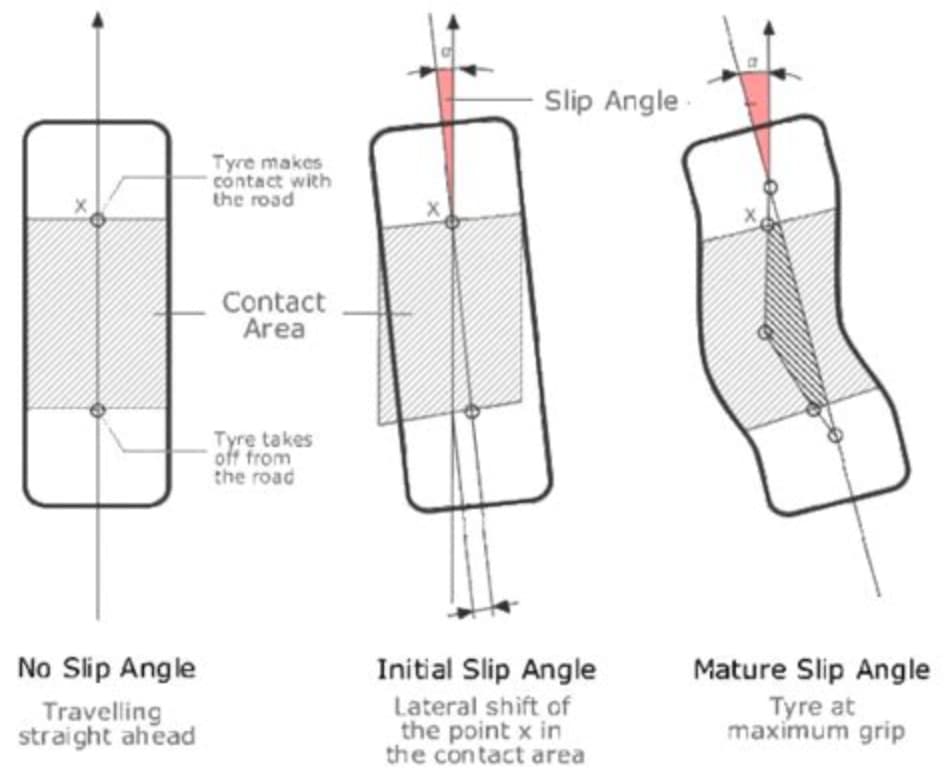
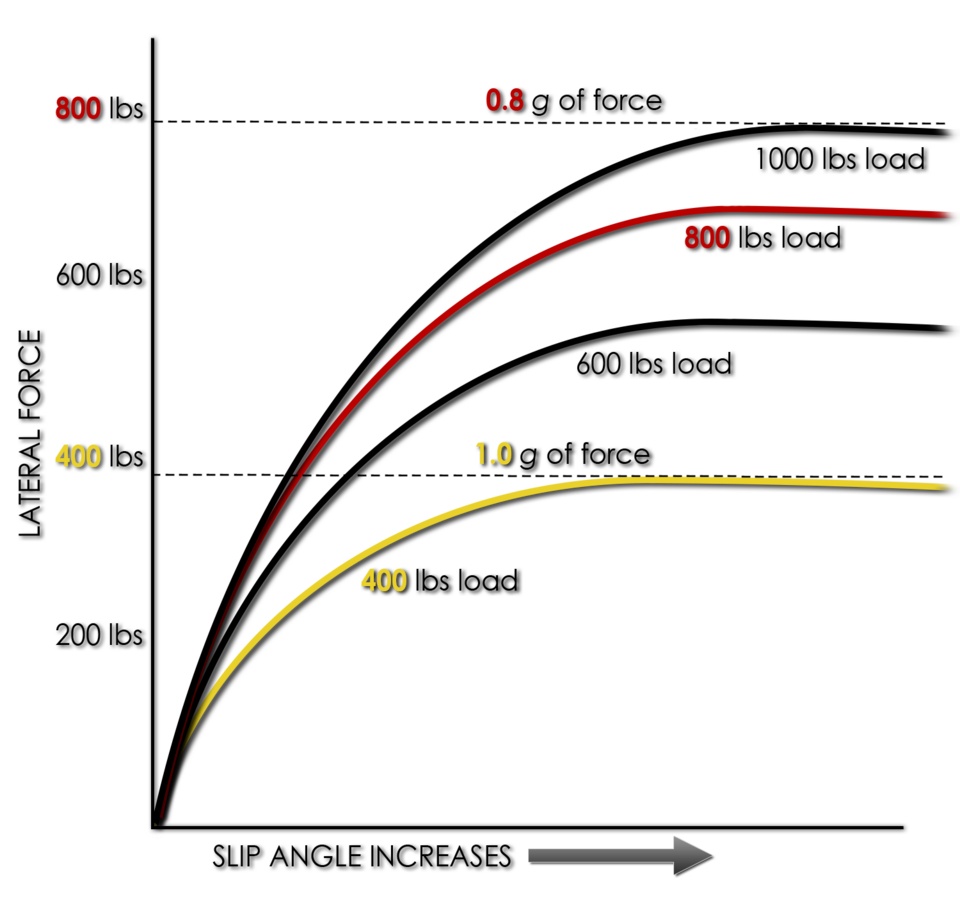
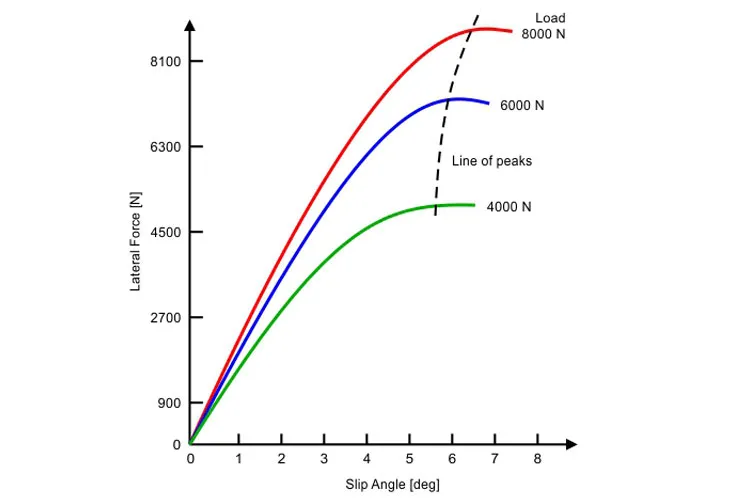
…which means that doubling (200%) the tyre weight (load) on a tyre does NOT double the amount of cornering force a tyre can generate, i.e. normal force is NOT proportional to coefficient of friction/usable traction and/or tyre weight (load) is NOT proportional to cornering force, but it DOES increase, with the peak being shifted towards larger slip angles (see fig. load3 & slipangle_6deg).
this is why lower tyre pressures or softer compounds have better traction (grip) at the cost of faster degradation and extreme sensitivity to temperature:
soft rubbers often provide better traction but also wear faster and have higher losses (of traction) when flexed, thus reducing efficiency.
this is also why at only one (1) degree of the slip angle, the aforementioned car in the game, which also has relatively soft tyres (27:24psi or 1,8:1,6bar), is able to produce almost 2g of lateral acceleration, which is extremely sensitive to a casual driver. this also shows that lightweighting (also known as weight reduction), such as interior stripping, is important for improving vehicle handling in this case.
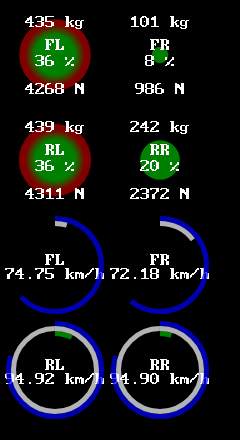
EXAMPLE: difference in lateral acceleration (cornering force) between a car without (left) and with (right) aerofoils on a front wheel drive (FWD) 4door sedan cornering to the right with sport (215/45R17) tyres.
NOTE: via the power of downward lift forces alone, a greater cornering acceleration was achieved, evident by the fact that the axles are loaded mostly evenly (35:45 vs 36:40) and require less steering input to achieve the same lateral acceleration as in the example without aero parts installed. this results in requiring more engine power at speeds over 150km/h, as well as getting used to the fact that the overall handling was changed, again, only at high speeds, making it possible to force a FWD car to oversteer like an RWD car via downforce, without any wheel alignment (more on this later).
NOTE: in beamNG, most spoilers are non-adjustable (fixed), so the angle of attack is unknown.
EXAMPLE: fullaero shows the effects of downforce while cornering to the right. dynamically, the best case scenario would be an equal weight and/or load transfer to the outer tyres (e.g. ~40:~40), but the aerofoil selection in beamNG is limited; splitonly shows the effects of installing only a splitter without a spoiler, where the aerodynamic drag cause the front axle to pitch downwards so much so that the RR wheel is effectively lifted off the ground, resulting in an oversteer; wingonly shows the effects of installing only a spoiler without a splitter, where the rear axle has a greater traction than the front axle, causing an understeer, which is more prevalent for RMR or rear-engined layouts; wingonly2 is ditto, except the opposite of splitonly, where the FR wheel is off the ground.
NOTE1: different cars were used! this is a TODO.
NOTE2: this goes without saying, but some of these examples are exaggerated and are not true to real life.
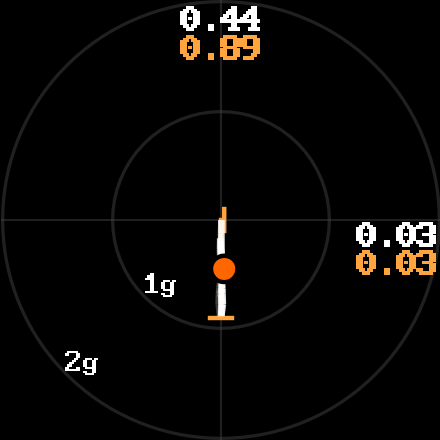
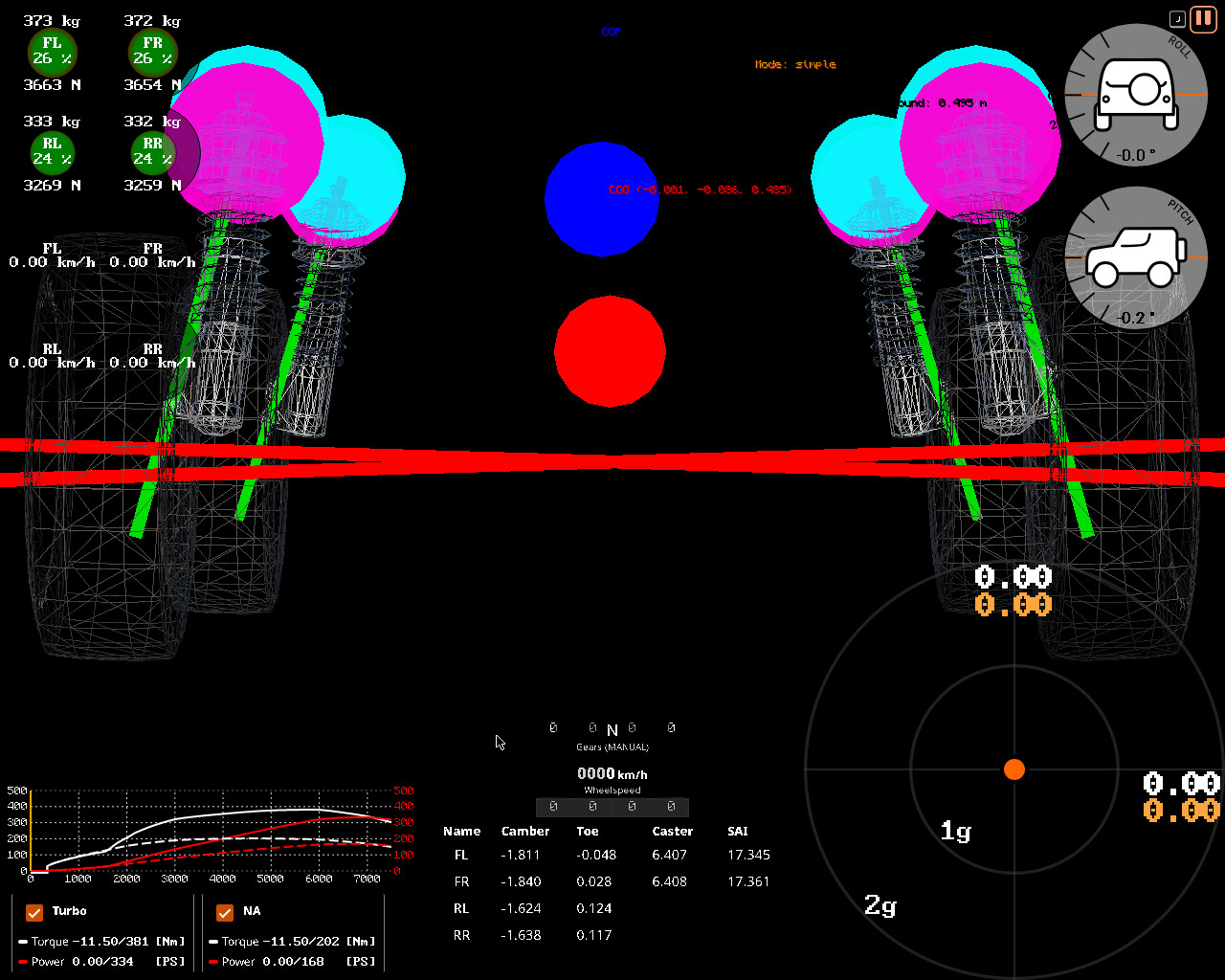
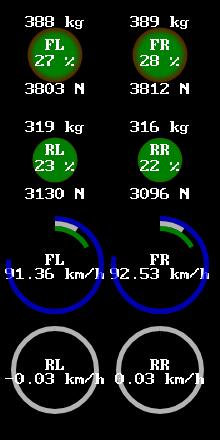
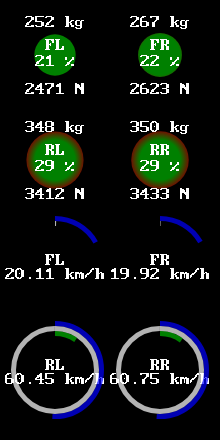
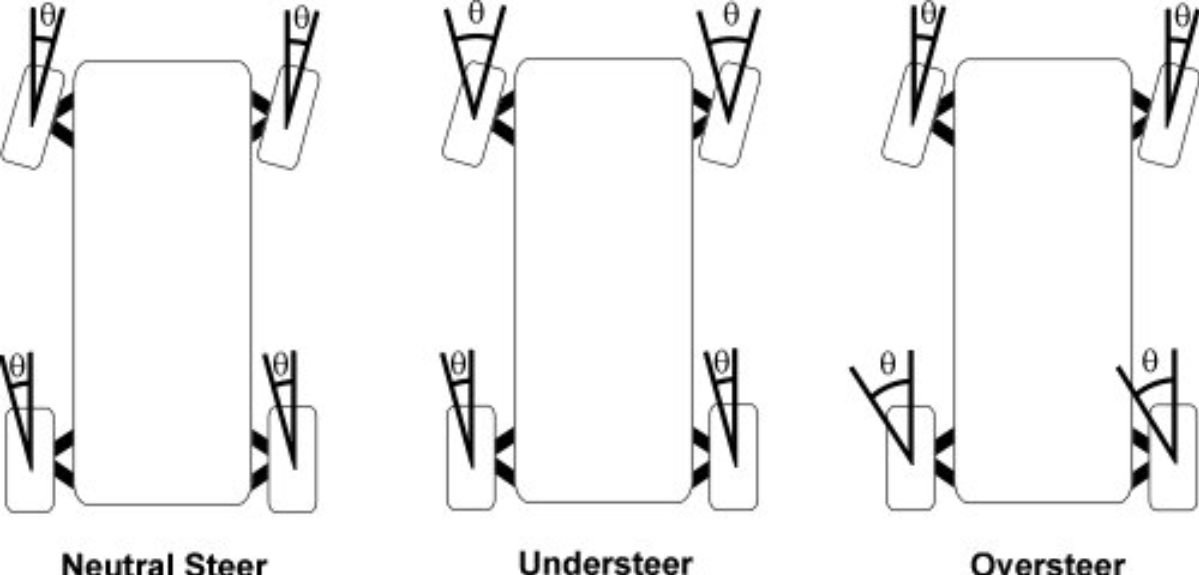
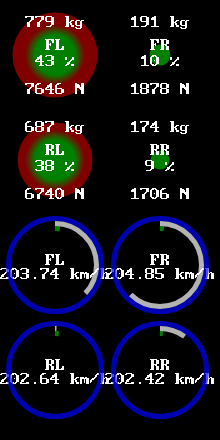
EXAMPLE: the best case scenario: a balanced handling in static and dynamic measurements, where on the left is the weight distribution in static (every wheel is carrying 1/4 or 25% of the overall sprung mass) and on the right is the weight/load transfer in a dynamic measurement (while cornering), where the outer wheels have an equal tyre load, contributing to or promoting a neutral steer (every wheel has an equal 1:1 slip angle of the front and rear axles).
list of 50%:50% cars in beamNG |
|
| ibishu hopper trackday |
|
| burnside special stock car |
|
| gavril barstow tracksport |
|
| gavril d trackday |
|
| gavril roamer roadsport |
|
| hirochi sunburst trackday |
|
| etk i trackday |
|
| etk k trackday |
|
| etk k gt4 |
|
| ibishu pessima trackday |
|
| ibishu bx trackday |
|
| ibishu wigeon mantis |
|
| gavril grand marshal trackday |
|
| … |
|
|
|
…are the only cars in beamNG with a balanced weight distribution in static and/or good load transfer / tyre sensitivity while cornering (~100km/h). every other car in the game is either slightly understeering or oversteering due to an unbalanced weight distribution (see examples below).
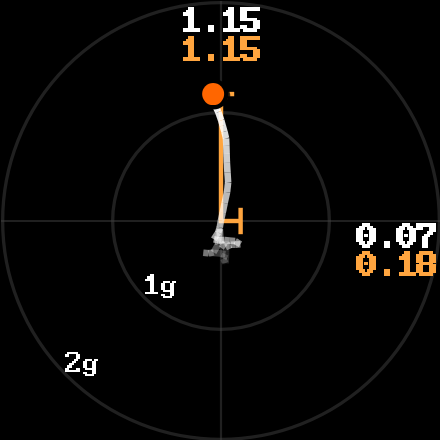
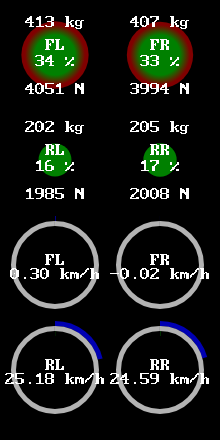
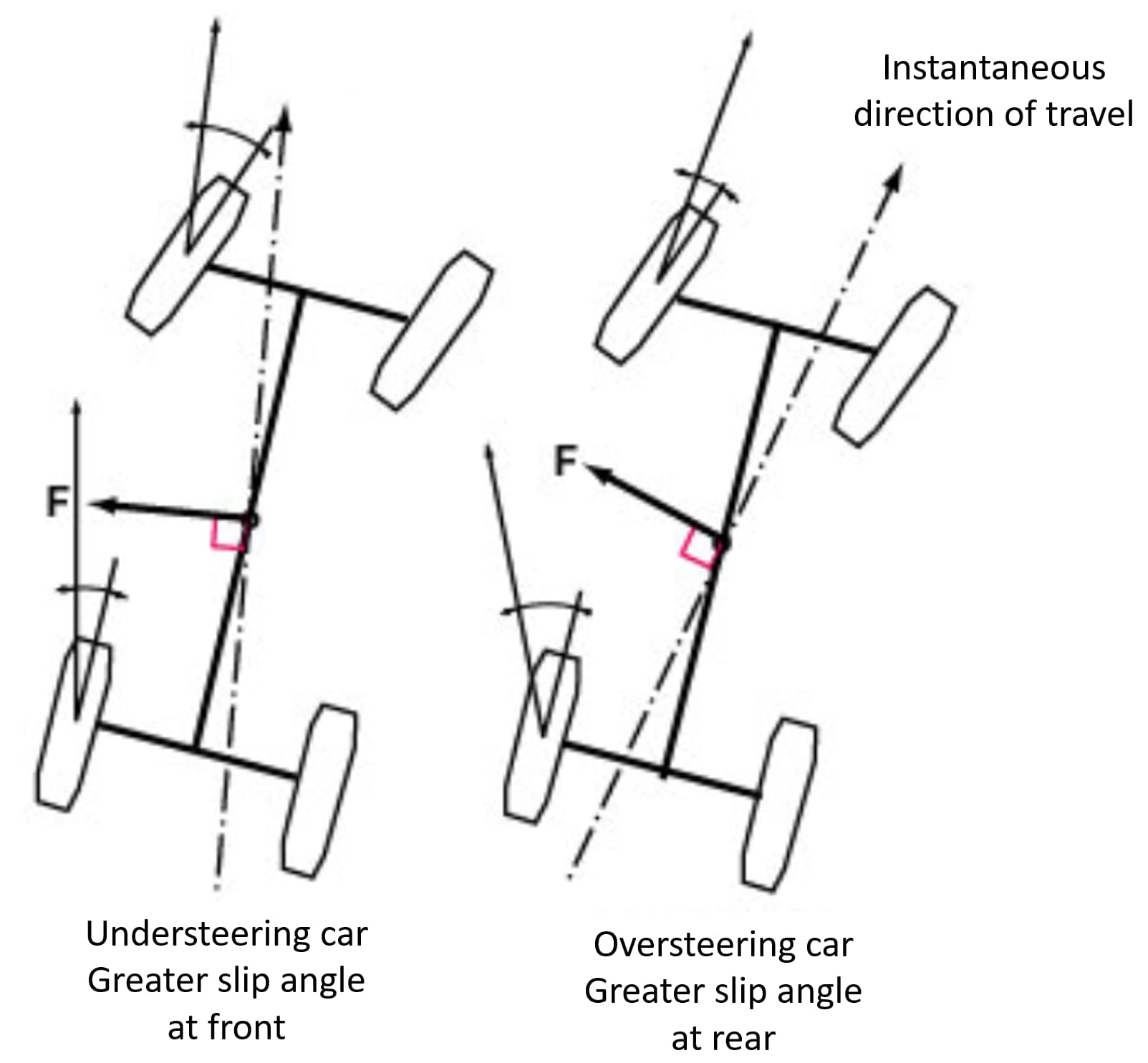
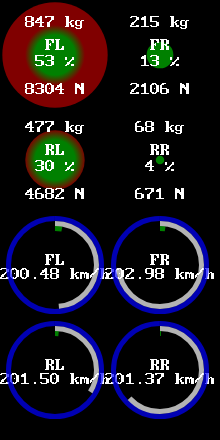
EXAMPLE: a typical front-engine front wheel drive layout (FF) and cornering behaviour; such drivetrain setups are front-heavy and are sensitive to understeering.
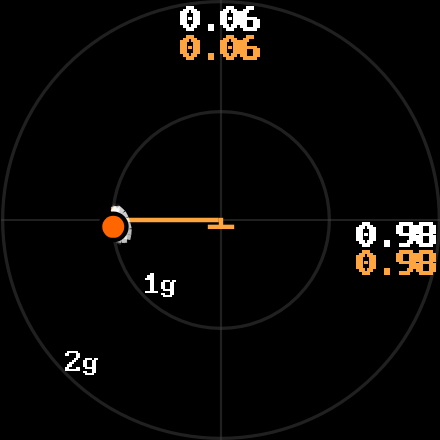
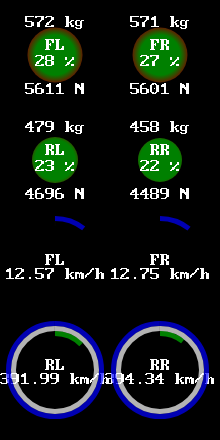
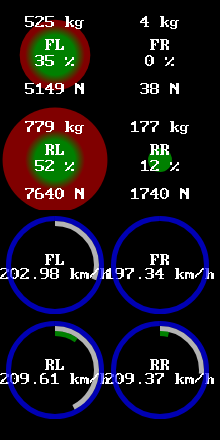
EXAMPLE: a typical middle-engine or rear-engine rear wheel drive layout (RMR) and cornering behaviour; such drivetrain setups are rear-heavy and are sensitive to oversteering.
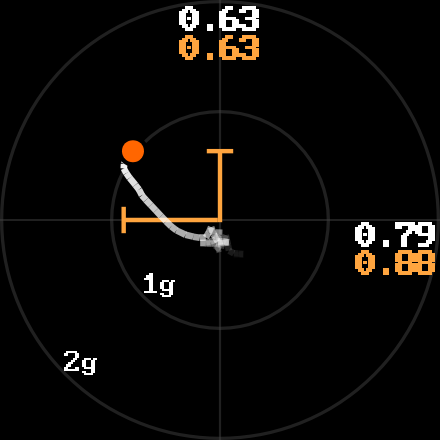
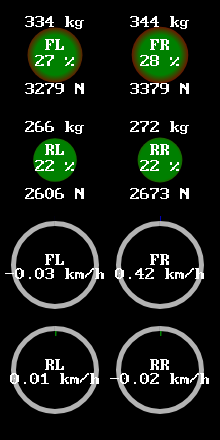
EXAMPLE: a bonus hypothetical scenario, where the earth’s gravity was doubled (2g); the weight distribution under 2g of gravity gives NO apparent benefits than under normal gravity. the tyres must put a greater effort in steering (as seen in toe angles), because twice the increased tyre load introduces slippage at lower slip angles at ANY speed, unlike what happens at high speeds with downforce.
NOTE: some players in beamMP abuse this environmental gravity to gain artificial “grip”. however, as mentioned previously, twice the tyre load does NOT equal twice the cornering force.



TODO: this is literal hell. i should simplify.
traction theory (frictional forces) states that one of the main factors affecting coefficient of friction/traction are:
relative motion of tractive surfaces, where a sliding (slipping) object (one in kinetic friction) has less traction (grip) than a nonsliding object (one in static (rolling) friction).
as well as…
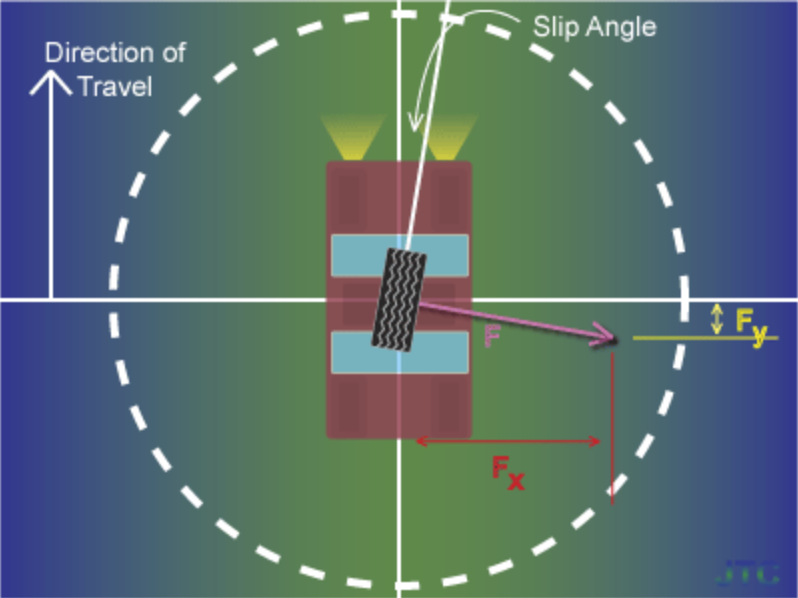
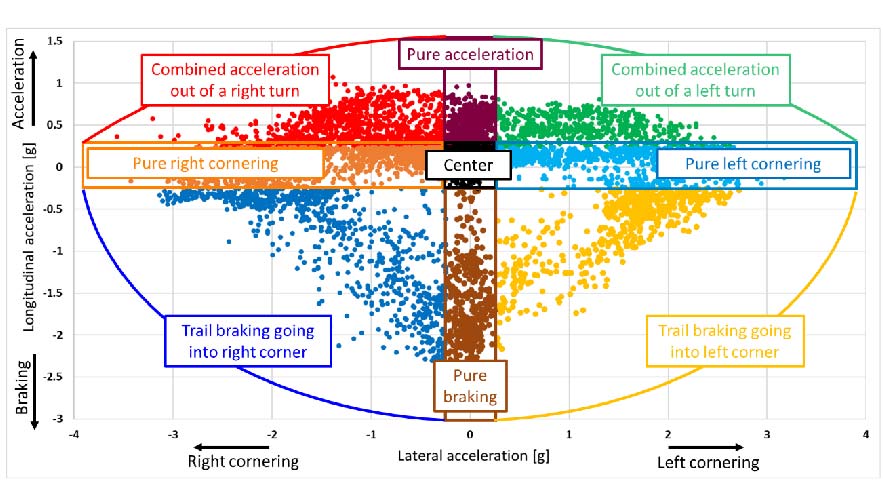
direction of traction relative to some coordinate system (traction circle), e.g. the available traction of a tyre often differs between cornering, accelerating, and braking, or all of the above combined.
moreover:
the tyre can withstand approximately the same absolute force relative to the road surface in any direction. graphically represented, a circle (or ellipse) of force magnitude represents the maximum tyre traction, and the force vector can be in any direction up to the limit of the circle without tyre slip. a tyre that can withstand 0.8g of force in braking can also withstand 0.8g of force in turning or in acceleration, or for example approximately 0.56g of cornering and 0.56g of braking simultaneously, summing to 0.8g at a 45 degree (slip) angle. once the force exceeds the limit circle, that tyre starts to slide (slip).
coulomb friction theory says that the maximum horizontal (lateral) force developed should be proportional to the vertical load on the tyre. in practice, the maximum horizontal (lateral) force (Fy) that can be generated is proportional, roughly, to the vertical load (Fz) raised to the power of somewhere between 0.7 and 0.9, typically.
so, if the traction (adhesion) circle (static friction) is exceeded (overcome), the tyre(s) will slip (kinetic friction), as in spin faster than the other tyre(s), because kinetic friction has a lower coefficient of friction (CoF) than static friction (e.g. ice vs tarmac, steel vs rubber), which can lead to an understeer or an oversteer. this phenomenon is the same as that of a brake lockup, when the tyres are NOT in a rolling motion, but rather sliding (as if with engaged handbrake), as the dry friction generated is mainly kinetic - relative motion between two objects (tyre & ground). therefore, it is slower and more difficult to regain traction when the tyre is slipping at a full kinetic friction (>1g), than keeping a margin of some static friction (~1g), as less deceleration and slowing down is required, because the threshold of adhesion (stiction) between static and kinetic frictions would increase considerably, e.g., when controlling an understeer, it is impossible to return to the same lateral acceleration as before the understeer. remember: a tyre in a rotary motion is actually stationary (NOT moving), as the contact patch is subsequently sticking (adhering) via static friction (see previous post), unless it is slipping. this may sound absurd and difficult to understand, but it is an optical illusion, a yet another convention (social norm) that literally everyone (engineers/scientists) agreed on:
even though the wheel is in motion, the patch of the tire in contact with the ground is stationary relative to the ground, so it is static rather than kinetic friction. upon slipping, the wheel friction changes (via stiction) to kinetic friction.
thus, a slipping tyre spinning at a wheel speed of 100km/h faster than the vehicle speed of 75km/h has (roughly) the same coefficient of traction/friction as a tyre that is NOT rotating (wheel speed of 0km/h), but sliding at the velocity of the vehicle (75km/h), because the threshold (limit) of adhesion (traction) has been exceeded (overcome). basically, a locked up and a slipping tyre is easy to maintain simply by lifting the pedals and steering straight:
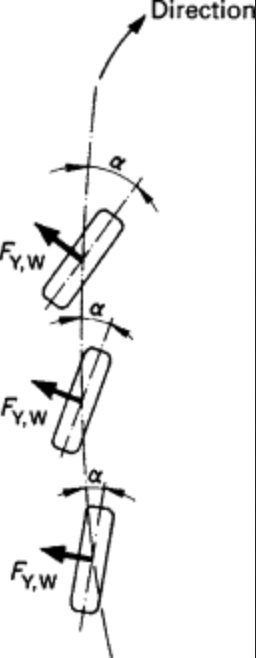
this is why driver training courses teach that, if a car begins to slide sideways, the driver should avoid braking and instead try to steer in the same direction as the slide. this gives the wheels a chance to regain static contact by rolling, which gives the driver some control again.
however, when describing understeer and oversteer, we use the same definition for both steady-state (linear) and nonlinear (frictional) situations, i.e. when the tyres have traction (grip) or not, or whether the tyres have reached the maximum cornering force peak at a given slip angle or not. so, “under the limit” is a linear, natural and a predictable characteristic of the tyres, whereas “over the limit” is a nonlinear, random and non-deterministic consequence (result) of oversaturation or overwhelm of the tyres, often induced by the driver’s input. for example, in motorsport, an ideal racing line is done by “touching” the apex of a corner, where if a professional driver misses the braking point - the driver will not panic and the car will simply travel a longer, suboptimally “wide” arc - all while “under the limit”, but if an inexperienced driver misses the braking point - they might try to overcorrect their error and lock up the brakes and/or steer too much so that the car understeers or oversteers - a human-induced “over the limit” scenario. this is an important difference: the distinction between a vehicle setup (configuration), e.g. wheel alignment (design); and a vehicle response (behaviour) to lateral accelerations (physics) of/at each axle. for example, production passenger cars are designed to understeer “under the limit” even when applying throttle in a corner and never reaching the “over the limit” range. it is also why newbie drivers/students in racing/driving academies/schools (HPDE) are taught to give a “margin of error” or to drive just “under the limit”, be it of speed and/or cornering force, despite the fact that the car is capable of pushing harder - obviously, it would be more difficult to learn starting from the extreme end at first; nonetheless, usually the driving instructor cars are modified and/or converted.
car and motorsport enthusiasts often use the terminology informally in magazines and blogs to describe vehicle response to steering in a variety of manoueuvres.
but driving “over the limit” is not always accidental. because of elastic hysteresis, rubber adheres (sticks) at greater coefficients of friction/traction especially when the tyres are warm - therefore, it is also a racing strategy (e.g. in circuit racing, albeit this is seldom seen in 24 hour endurance racing, where tyres’ durability is more important), where drivers deliberately corner just "over the limit” (peak) of the tyre’s maximum cornering force for the tyres to generate heat quicker in order to corner at greater lateral accelerations at the expense of the tyres’ faster wear and tear, as well as their atmospheric pressure (inflation) as a reaction to thermal-induced expansion, before promptly returning to the pit stop for a tyre swap sooner than NOT driving “over the limit”; basically, in the short-term, the traction resulted is practically the same as the traction generated when cornering “under the limit”, but in the long-term, the produced thermal exchange with the tyre pressure (inflation) itself will determine the CoF/CoT, so that such aggressive cornering only makes sense for the first laps of the race. nevertheless, such preference to “push it to the limit” is extremely situational 
 and may be inefficient (slower) on some types of racing tracks, their surfaces and conditions (see all variables above). for an extreme instance, in drifting (motorsport), a typical street treaded tyre will have its structural integrity delaminated (separation of a material’s layers) in just less than an hour (
and may be inefficient (slower) on some types of racing tracks, their surfaces and conditions (see all variables above). for an extreme instance, in drifting (motorsport), a typical street treaded tyre will have its structural integrity delaminated (separation of a material’s layers) in just less than an hour (<60min) due to the excessive scrubbing and generated thermal damage (tyre’s melting point is only ~100-150*C, at which it becomes soft and liquified), rendering the traction non-existent (as well as making the tyres illegal to drive in many countries of the world), which would be suboptimal in a race having to change the tyres this often, unless special heat-resistant racing or drifting slick tyres were to be used.
in short, when your favourite sim racing youtuber/streamer/driver steers to a full lock before a tight corner - it is a deliberate technique, that is NOT “over the limit”, it is actually “under the limit”, because cars are usually designed and aligned to understeer, which is safer than oversteer.
NOTE: unlike other sim racing games (e.g. iRacing), beamNG does NOT have tyre thermal simulation by default, but it can be installed using this user created mod (which will be deprecated with the next major tyre update):
…
TODO: explain slip ratio and its relation with CoF!!!
TODO: wheel alignment is next.