NO AI POLICY:
i REJECT clankers in use of my work to “train” models.
sometimes, you just dont wanna crash…



but you still do. here’s why:



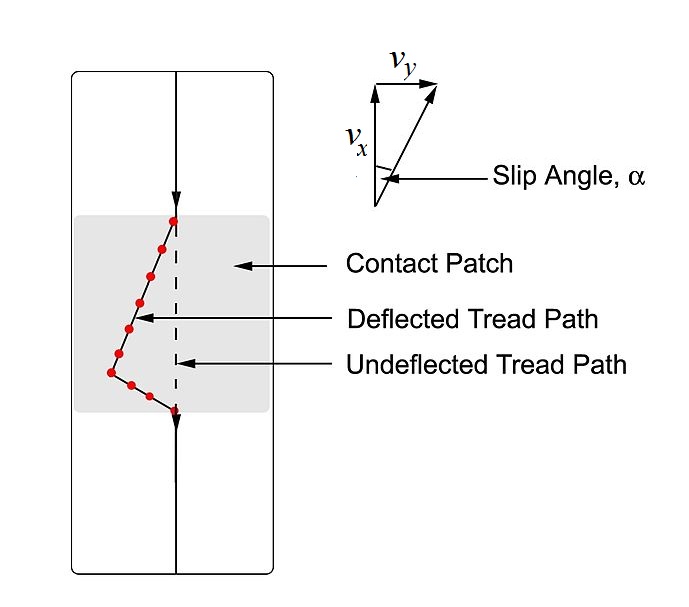
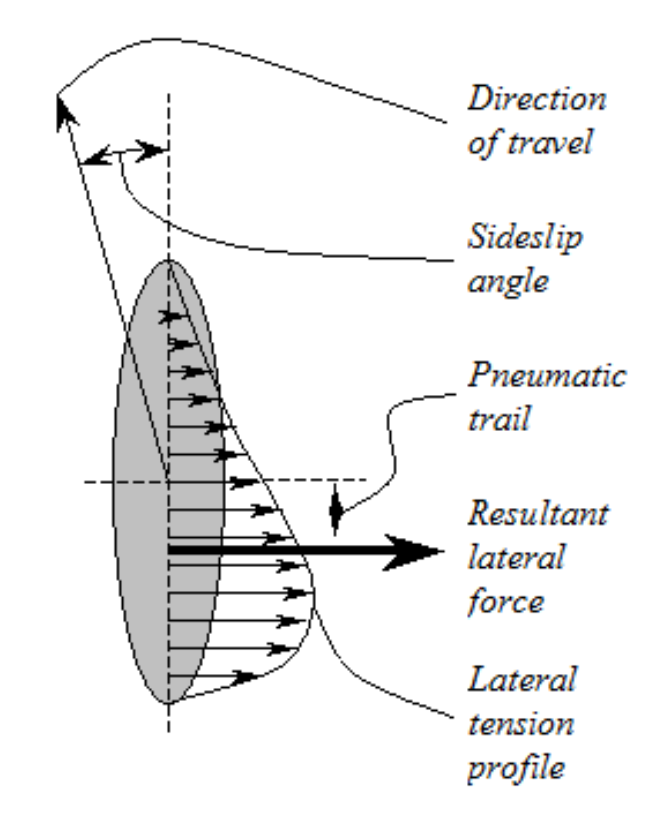
(where V(x) is the longitudinal (forward) velocity vector, and V(y) is the sum of V(x) and lateral (horisontal) velocity vector V(y))
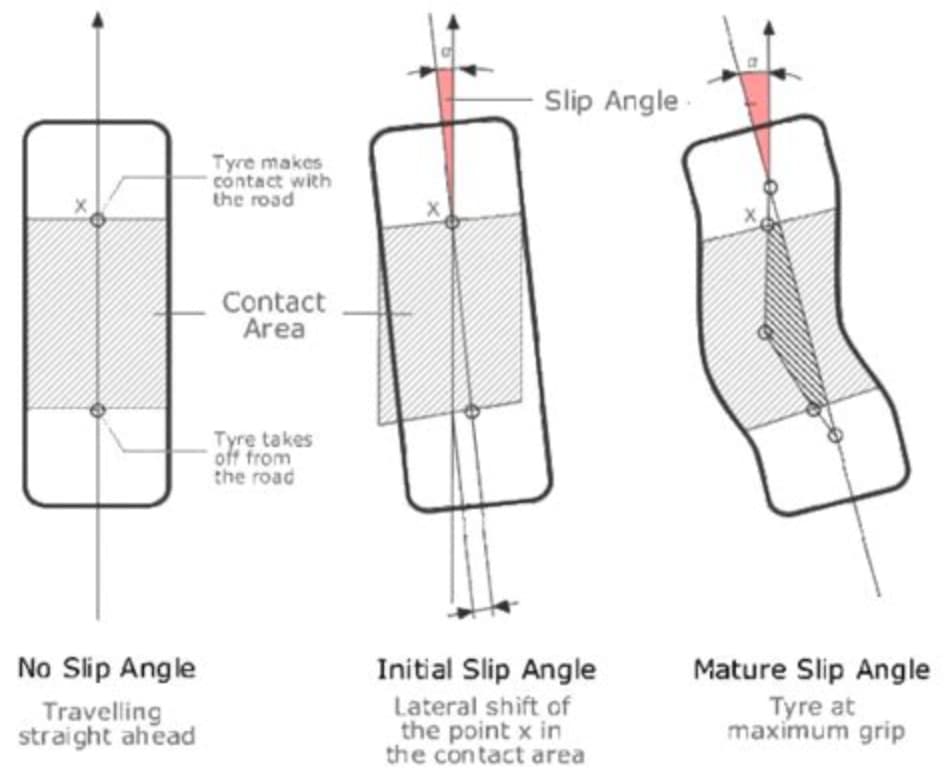
is an angle of rolling subsequent viscoelastic contact patch deflections relative to the centreline of a steered tyre, i.e. the difference in degrees between where the tyres are pointing to (heading) and where they are actually travelling to (course).
no literal slippage occurs, actually. 

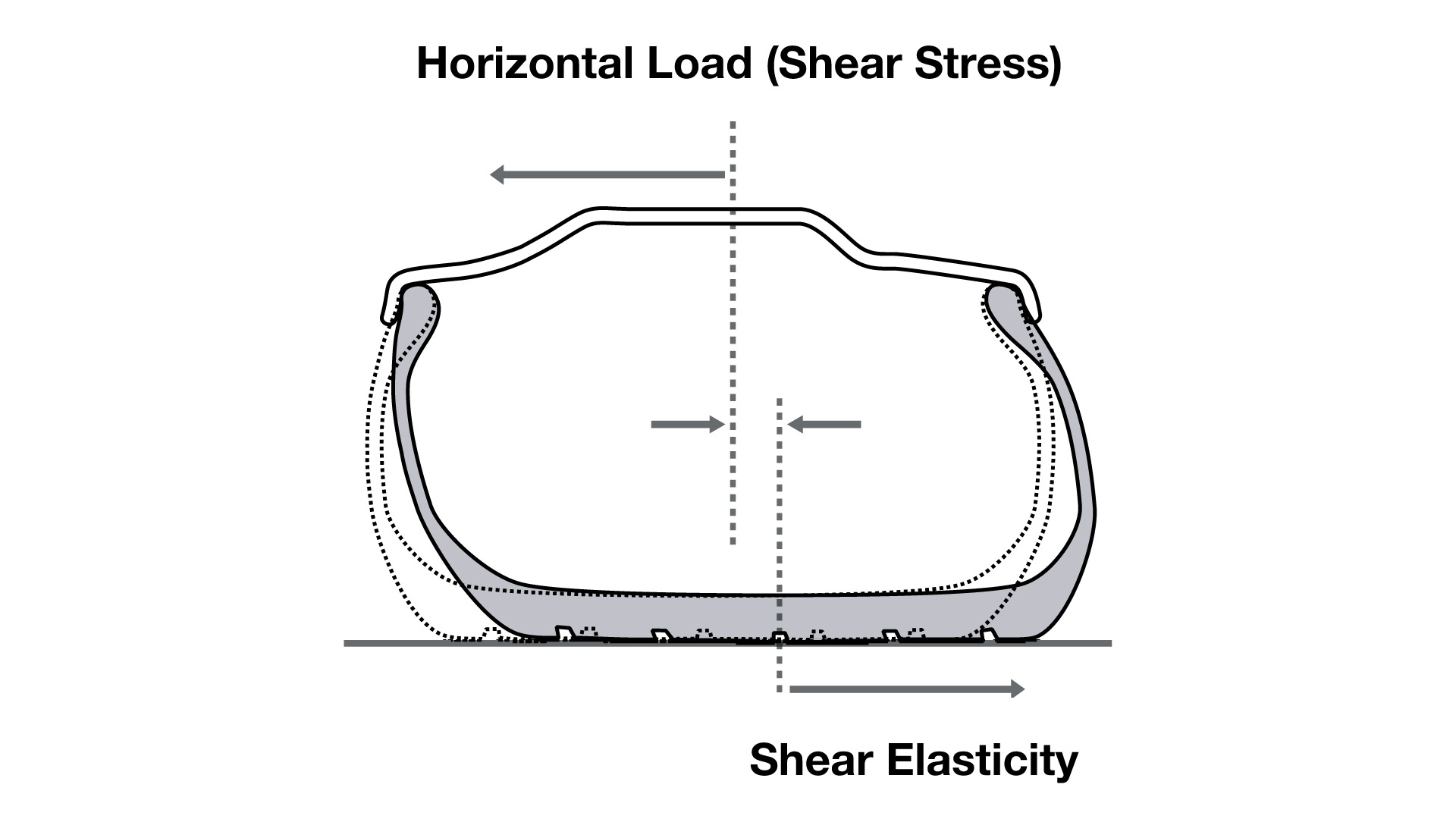
tyre’s “sticky” (adhesive) nature, like honey, resists (stretches and relaxes) the twisting motion and static (dry) friction with the ground texture, as well as centrifugal, inertial and drag forces, and produces a reaction force - a (lateral) cornering (side) force (or stiffness, like a spring) as a result of shearing strain (deformation) and mechanical stress (which generate mechanical traction (grip) and dissipate as heat).
NOTE1: wheel turning RIGHT.
NOTE2: albeit confusing, the last picture is relative to the direction of actual travel, which appears to be turned in the opposite direction of steering.
at any slip angle, the lateral forces of the front tyres generate a “twisting” yaw moment around the vehicle’s centre of gravity (CoG), which results in additional slip angles on the rear tyres, supporting the vehicle’s turning (inertial) motion - a centripetal force.
the assymetric slip angles of the front and rear axles will determine the behaviour of the vehicle as it is negotiating a turn.
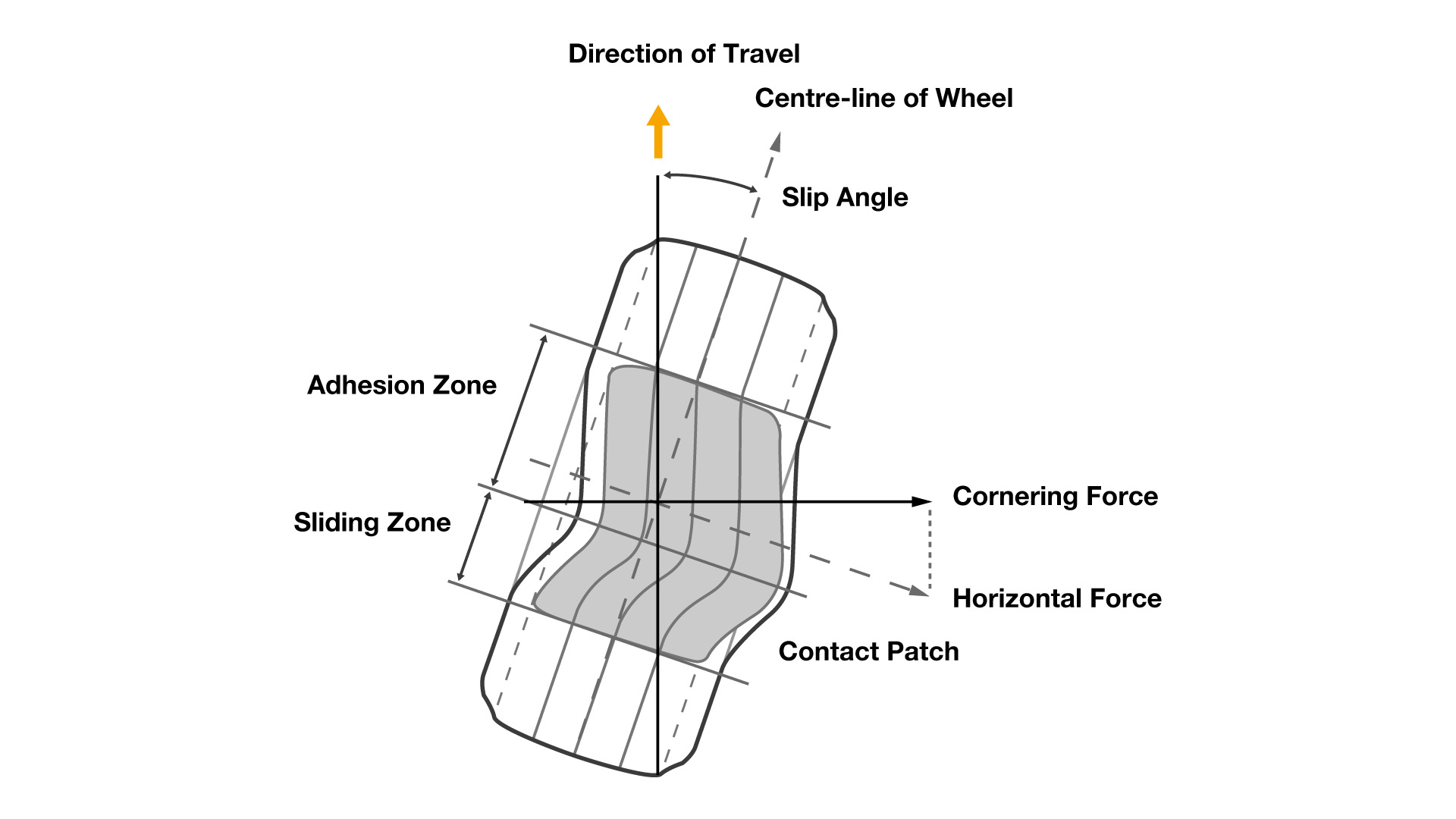
NOTE1: wheel turning LEFT.
NOTE2: the cornering force is created perpendicular (90 degrees) to the direction of travel! horisontal (lateral) forces is everything else (inertial, frictional, centrifugal, centripetal F, etc.), that is sometimes mixed up with the cornering force. [idk]
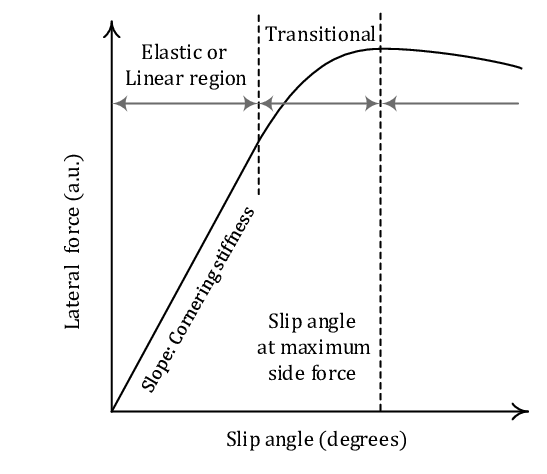
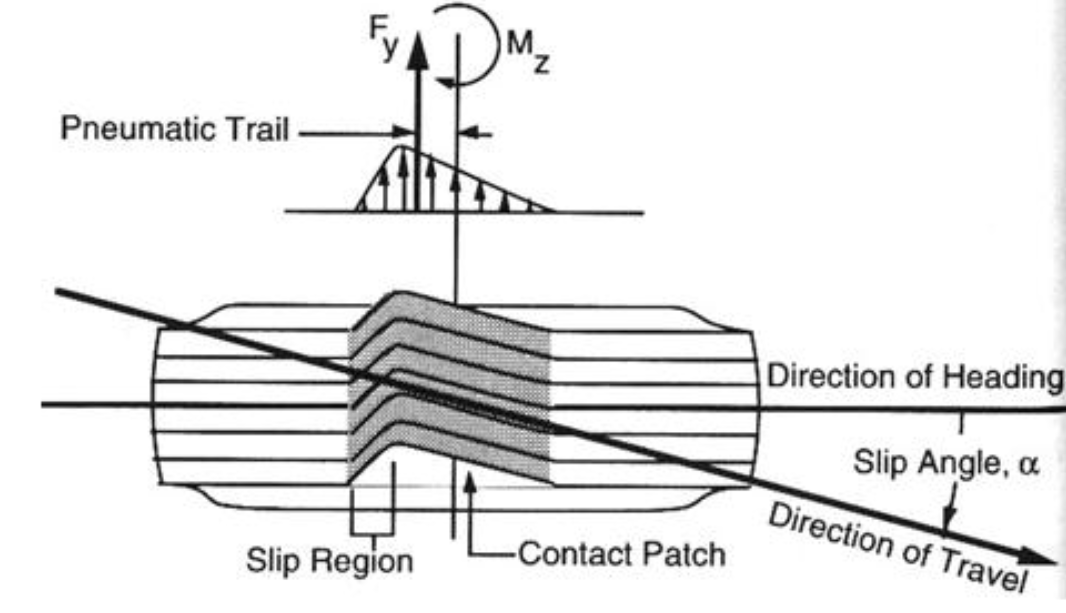
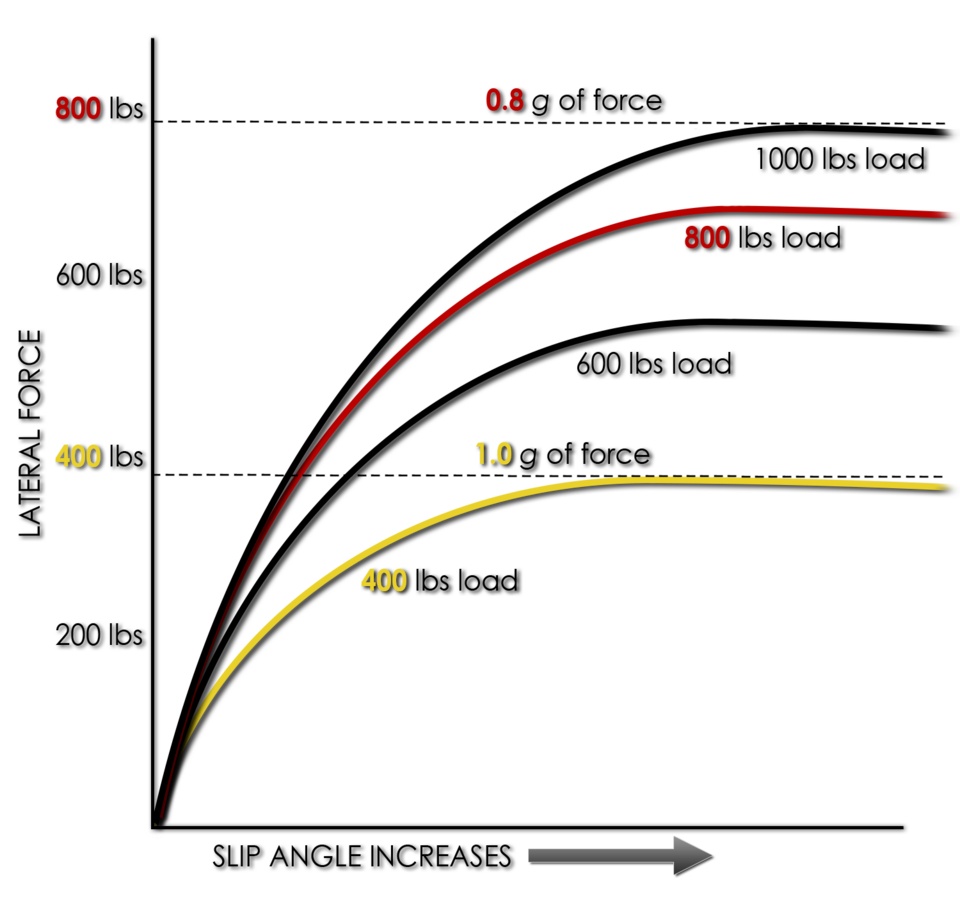
per every degree of slip angle, the cornering force increases to a maximum (peak; limit), until the adhesive area (stick zone) of the contact patch is exceeded by the slippage (slip area) (creepage), as it begins to decrease. the rate at which it builds up is described by relaxation length and the distance of the pneumatic trail, which creates a self aligning torque (moment) at the trailing edge (behind) of the contact patch, before returning to its original (linear) shape.
you can test how much of this lateral force your vehicle is able to withstand at a given slip angle by observing it dynamically via a GG diagram (accelerometer) and experimenting to determine at what limit (peak) does frictional (kinetic) slip and loss of traction (grip) develop.
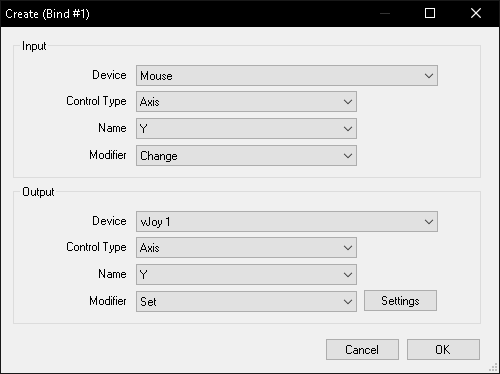
NOTE: it is worth noting that, in beamNG, fluid dynamics are simplified - the drag coefficient is predetermined (baked) into each and every coltris (triangle) of the jbeam:
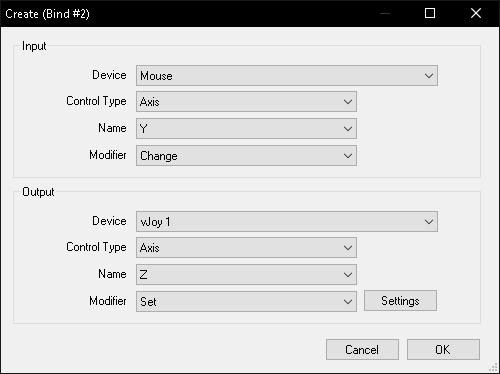
the aero system in beamNG works by calculating drag on all triangles based purely on the speed of the airflow, the surface area and drag properties of the triangles. the drag and lift forces are then applied on the adjacent nodes. triangles are NOT affected by other triangles, meaning that triangle in the back of your vehicle will still create the full drag.
because of this, you might need to fine tune the drag coefficient of your various components based on how exposed to airflow they are. this also lets you add surfaces to simulate ground effect, or fine tune the lift distribution on your vehicle.
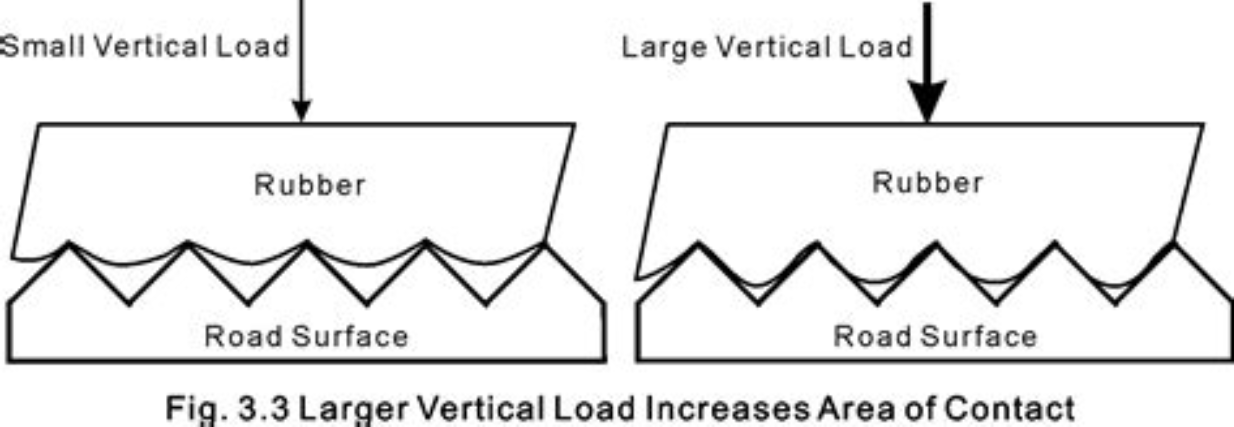
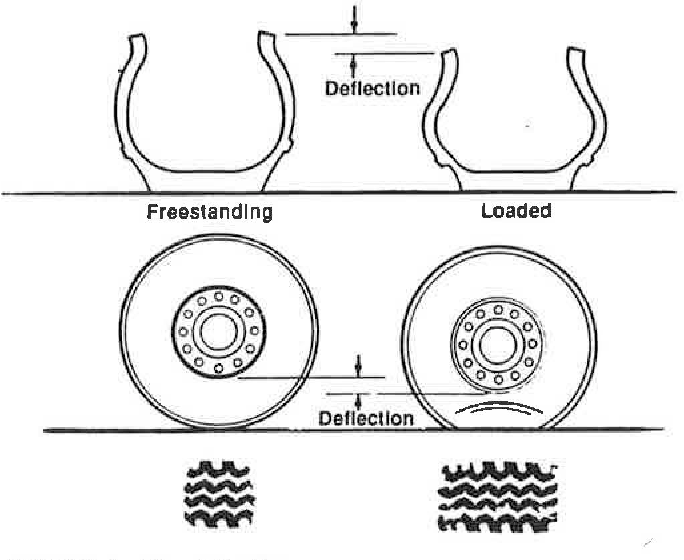
sideslip angle varies with slip ratio (longitudinal rolling percentage), (vertical) tyre load, aerodynamic forces (downforce, ground effect, drag coefficient, centre of pressure), weight and/or load transfer (centre of mass, centre of gravity), atmospheric pressure (pneumatic inflation), engine power and engine (machine) torque, speed (torque, horsepower, angular acceleration, angular velocity, rotational inertia, etc.), unsprung (suspension) mass and sprung (gross) mass, roll centre, weight distribution, body roll, automotive electronics (ABS, TCS, ESC, etc.), suspension geometry (height or clearance, anti-dive and anti-squat, anti-roll or anti-sway bars), steering geometry (ackermann, power steering), wheel alignment (camber and centripetal forces, castor, toe), tyre tread (pattern) (racing slick, stiction, tractive (traction) force, rolling resistance) and surface conditions (static and kinetic (dry) friction and their coefficients), etc.
slip angle is NOT to be confused with slip ratio - forward (longitudinal) forces as a percentage of the velocity of the vehicle relative to the observed (theoretical) angular velocity (free-rolling speed) of the tyre, i.e. apparent (evidental) slipping (sliding) or “locking” due to excessive acceleration (throttle) and/or deceleration (braking). however, it is just as important, e.g. in trailbraking and drifting.
please see anti-lock braking system (ABS), traction control system (TCS), electronic stability control (ESC), weight & load transfer, anti-dive & anti-squat, coefficient of friction (mu) (static and kinetic frictions), coefficient of traction, etc.

tl;dr
in layman’s terms, there are four (4) rubber bands that get squishy and stretchy - two (2) in the front and two (2) in the rear. they are going in different ways, because the rear cant turn. this can make you turn too little or too much.
alternatively, imagine walking or running (irl). when you turn, you make a sharp (angled) stepping pattern with your feet. that is because it is impossible to turn smoothly in the middle of walking or running because of static friction and inertia - the current foot that is in the contact with the ground is unable to turn on its own, while the other is in the air, unless you are stationary (or a ballet dancer / figure skater) - which is what rubber does when it “sticks” (adheres) to the ground every millisecond as it appears to be “rolling”, when in fact, as far as physics are concerned, the tyre is static (stationary). it is only “temporarily” in motion, as it overcomes static friction. so, you are NOT moving RELATIVE to the ground, UNLESS you are on ice or slipping, which is no longer static - it is kinetic friction!
…